-
-
-
Phí vận chuyển: Tính khi thanh toánTổng tiền thanh toán:
-

Động Cơ DC Servo JGB37-545 24VDC
(Mã SP:PVN2361)
Thương hiệu: Chưa cập nhật
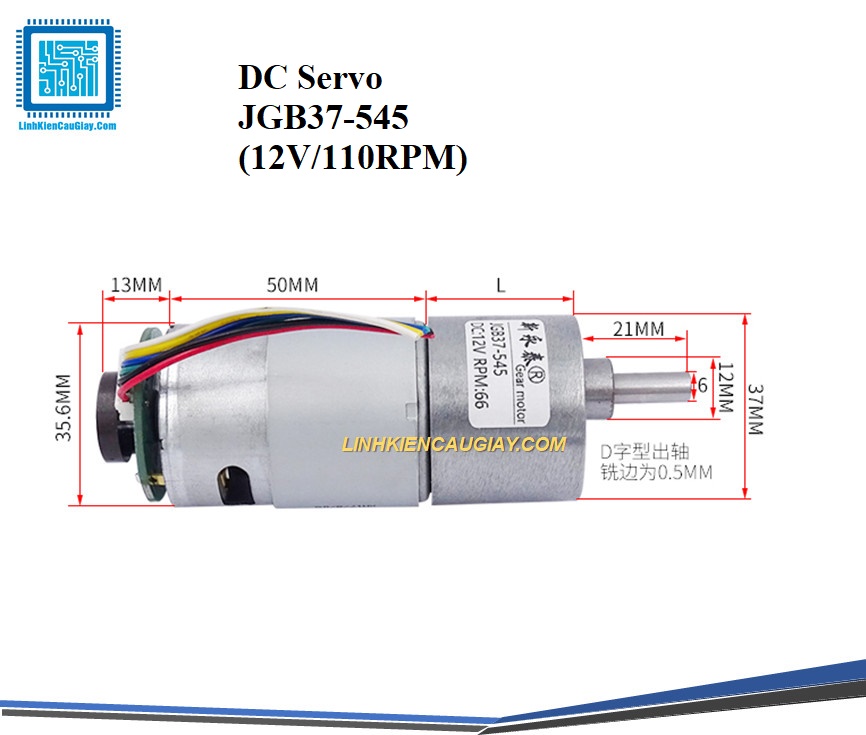
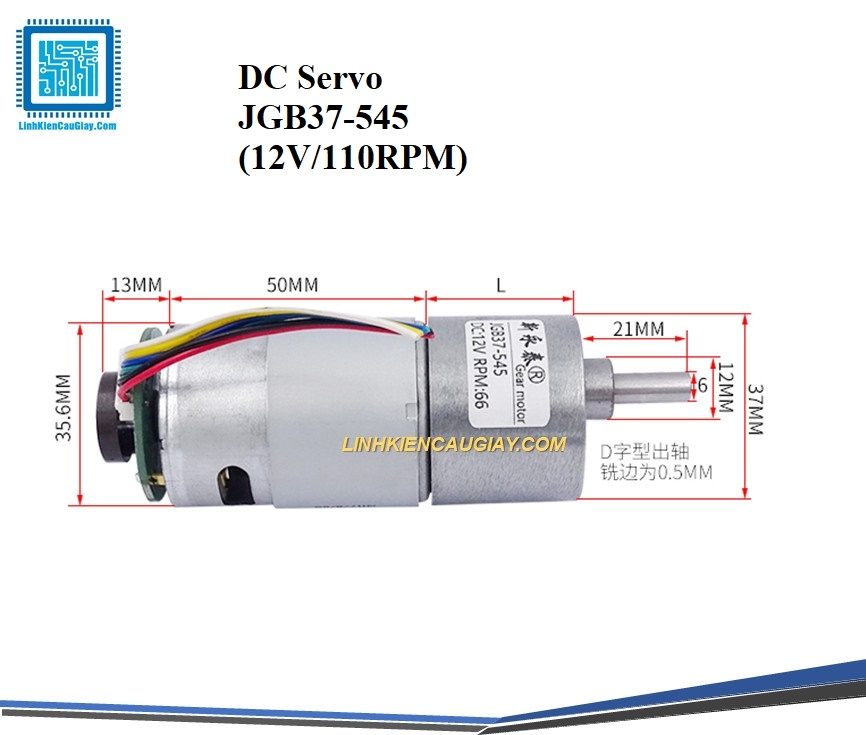
Động Cơ DC Servo JGB37-545 (12V/110RPM)
Động cơ DC Servo JGB37-545 DC Geared Motor được tích hợp thêm Encoder hai kênh AB giúp đọc và điều kiển chính xác vị trí, chiều quay của động cơ trong các ứng dụng cần độ có chính xác cao: điều khiển PID, Robot tự hành,....
Động cơ DC Servo JGB37-545 DC Geared Motor có cấu tạo bằng kim loại cho độ bền và độ ổn định cao, được sử dụng trong các mô hình robot, xe, thuyền,..., hộp giảm tốc của động cơ có nhiều tỉ số truyền giúp bạn dễ dàng lựa chọn giữa lực kéo và tốc độ (lực kéo càng lớn thì tốc độ càng chậm và ngược lại), động cơ sử dụng nguyên liệu chất lượng cao (lõi dây đồng nguyên chất, lá thép 407, nam châm từ tính mạnh,...) cho sức mạnh và độ bền vượt trội hơn các loại giá rẻ trên thị trường hiện nay (sử dụng lõi dây nhôm, nam châm từ tính yếu).
Lưu ý trước khi sử dụng các bạn nên châm thêm nhớt hoặc chất bôi trơn vào hộp số của động cơ giúp động cơ chạy êm và bền hơn vì có thể trong quá trình lưu kho động cơ sẽ bị khô dầu.
Thông số kỹ thuật:
- Điện áp sử dụng: 12VDC
- Đường kính: 37mm
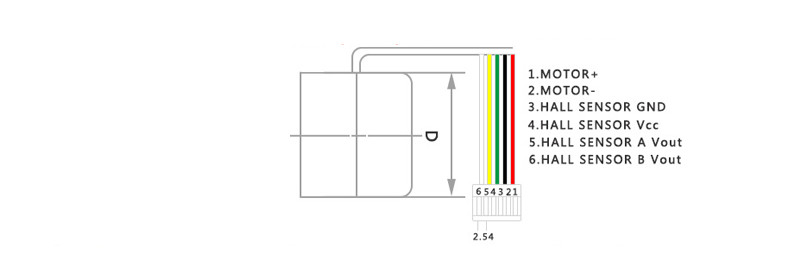
- Encoder: Cảm biến từ trường Hall, có 2 kênh AB lệch nhau giúp xác định chiều quay và vận tốc của động cơ, đĩa Encoder trả ra 11 xung/1 kênh/ 1 vòng (nếu đo tín hiệu đồng thời của cả hai kênh sẽ thu được tổng 22 xung / 1 vòng quay của Encoder).
- Cách tính số xung của mỗi kênh trên 1 vòng quay của trục chính động cơ = Tỉ số truyền x số xung của Encoder, ví dụ tỉ số 150:1 thì số xung Encoder trả ra cho 1 vòng quay của trục chính động cơ sẽ là 11 x 150 = 1650 xung / 1 kênh.
- Điện áp cấp cho Encoder hoạt động: 3.3~5VDC, lưu ý cấp quá áp hoặc ngược chiều sẽ làm cháy Encoder ngay lập tức!
- Loại 12VDC 110RPM:
- Dòng không tải: 200mA
- Dòng chịu đựng tối đa khi có tải: 3A
- Tốc độ không tải: 37RPM (37 vòng 1 phút)
- Tốc độ chịu đựng tối đa khi có tải: 30RPM (30 vòng 1 phút)
- Lực kéo Moment định mức: 32KG.CM
- Lực léo Moment tối đa: 90KG.CM
- Chiều dài hộp số L: 26.5mm
- Số xung Encoder mỗi kênh trên 1 vòng quay trục chính: 11 x 168 = 1848 xung.
Quý khách có thể mua thêm gá bắt động cơ tương thích tại đây.