-
-
-
Phí vận chuyển: Tính khi thanh toánTổng tiền thanh toán:
-



Tay Gắp Robot G6 Gripper
(Mã SP:CG000676)
Thương hiệu: Chưa cập nhật
230.000₫
370.000₫
Tay gắp robot kim loại hợp kim nhôm dùng cho servo MG995 MG996
Mô tả sản phẩm
Tay gắp robot kim loại hợp kim nhôm là phụ kiện cơ khí chuyên dùng cho các dự án robot, cánh tay robot DIY, xe robot thông minh.
Sản phẩm được thiết kế tương thích hoàn hảo với động cơ servo MG995 và MG996, cho lực kẹp mạnh, độ bền cao, hoạt động ổn định trong thời gian dài.
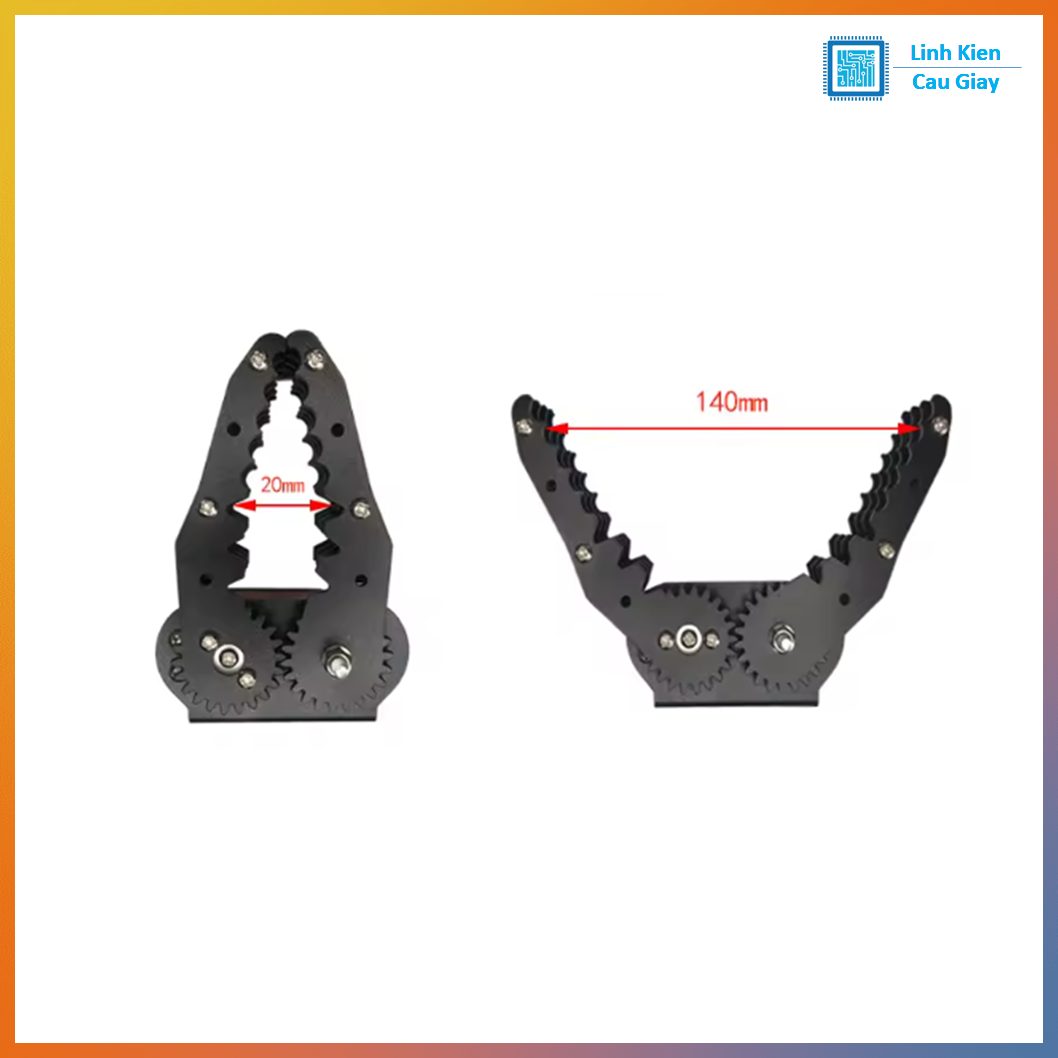
Cấu trúc kẹp trung tâm giúp tay gắp đóng mở cân đối, dễ dàng kẹp nhiều loại vật thể khác nhau như hình tròn, vuông, trụ hoặc vật không đều.
Chất liệu hợp kim nhôm cứng giúp giảm trọng lượng nhưng vẫn đảm bảo độ chắc chắn, phù hợp cho học tập, nghiên cứu, thi đấu robot và ứng dụng thực tế.
Ứng dụng
Cánh tay robot DIY
Robot giáo dục STEM
Xe robot gắp vật
Dự án Arduino, ESP32, Raspberry Pi
Mô hình tự động hóa mini
Nghiên cứu và giảng dạy cơ điện tử
Sơ đồ chân
Thông số kĩ thuật
Loại sản phẩm: Tay gắp robot kẹp trung tâm
Chất liệu: Hợp kim nhôm cứng
Màu sắc: Kim loại (nhôm)
Chiều dài tay gắp: 190mm
Trọng lượng:
71g (không kèm động cơ)
141g (kèm động cơ servo)
Lực kẹp tối đa: 800g
Khoảng kẹp vật thể: 20 – 100mm
Động cơ tương thích: MG995, MG996
Vật thể kẹp phù hợp: Tròn, vuông, trụ, hình dạng không đều
Hướng dẫn sử dụng
Bước 1: Gắn tay gắp vào trục servo MG995 hoặc MG996 bằng vít đi kèm
Bước 2: Cấp nguồn 5–6V cho servo
Bước 3: Kết nối dây tín hiệu servo với Arduino / ESP32 / vi điều khiển
Bước 4: Lập trình tín hiệu PWM để điều khiển đóng – mở tay gắp
Bước 5: Điều chỉnh góc servo để phù hợp lực kẹp mong muốn
Lưu ý
Không cấp nguồn quá 6V cho servo
Không kẹp vật vượt quá lực cho phép để tránh hỏng servo
Hình ảnh
Bảo hành
Linh kiện mới 100%, test kỹ nếu khách yêu cầu
Không bảo hành với linh kiện điện tử nhỏ (IC, chip, transistor…)
Quý khách cần có kiến thức cơ bản về điện tử để lắp đặt đúng cách
Hỗ trợ kỹ thuật miễn phí nếu liên hệ trước khi đặt hàng
Tại sao chọn mua tại Linh Kiện Cầu Giấy?
✅ Giao hàng toàn quốc – nhanh chóng, đóng gói cẩn thận
✅ Hỗ trợ kỹ thuật nhiệt tình, tư vấn đúng nhu cầu
✅ Cam kết linh kiện chính hãng, đúng mô tả
✅Giá cạnh tranh, phù hợp sinh viên, kỹ sư và DIY Maker
Hashtag
#tay_gắp_robot
#tay_gắp_kim_loại
#robot_gripper
#tay_gắp_MG995
#tay_gắp_MG996
#servo_MG995
#servo_MG996
#robot_STEM
#cánh_tay_robot
#linh_kiện_robot
#arduino_robot