-
-
-
Phí vận chuyển: Tính khi thanh toánTổng tiền thanh toán:
-





Tay Gắp Robot G3 Gripper
(Mã SP:PVN1953)
Thương hiệu: Chưa cập nhật
210.000₫
338.500₫
Tay Gắp Robot G3 Gripper
Mô tả sản phẩm
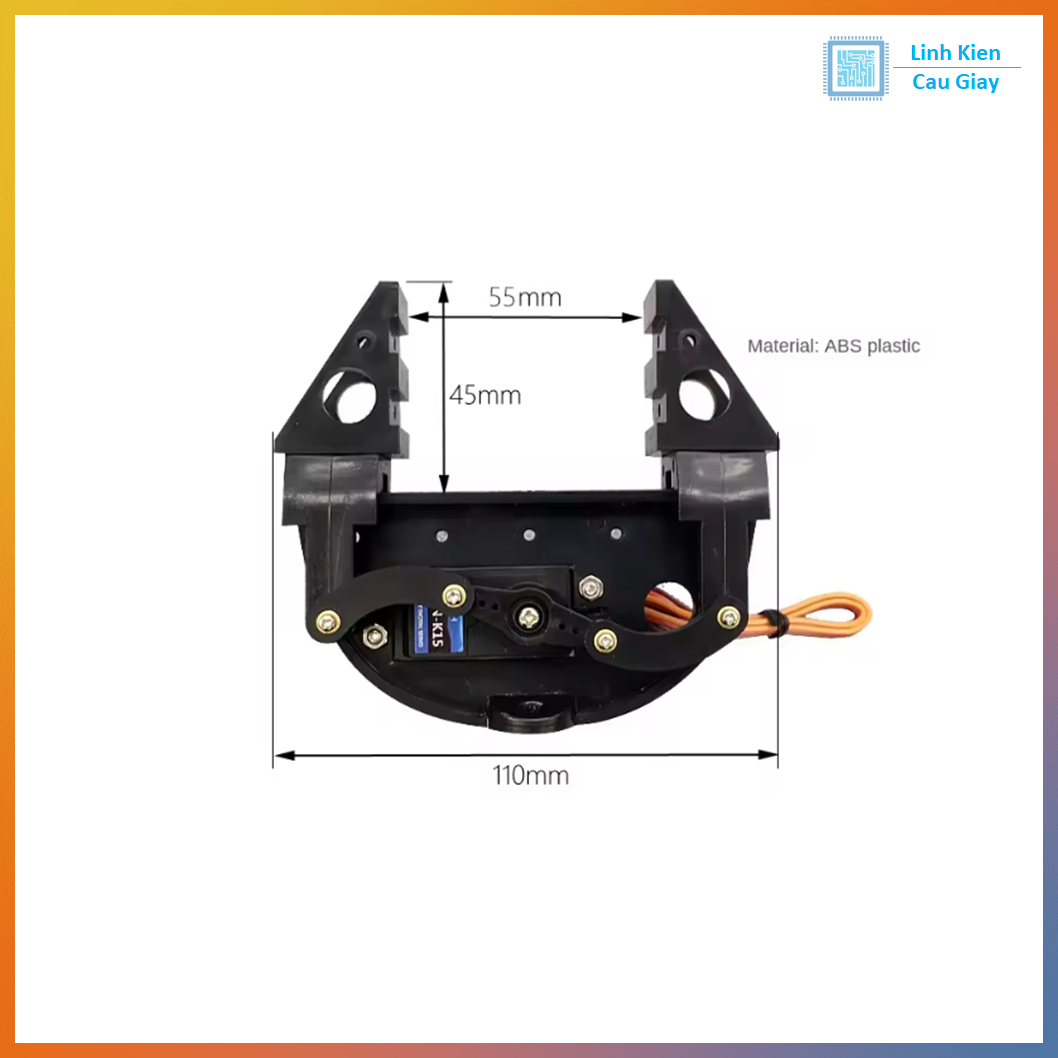
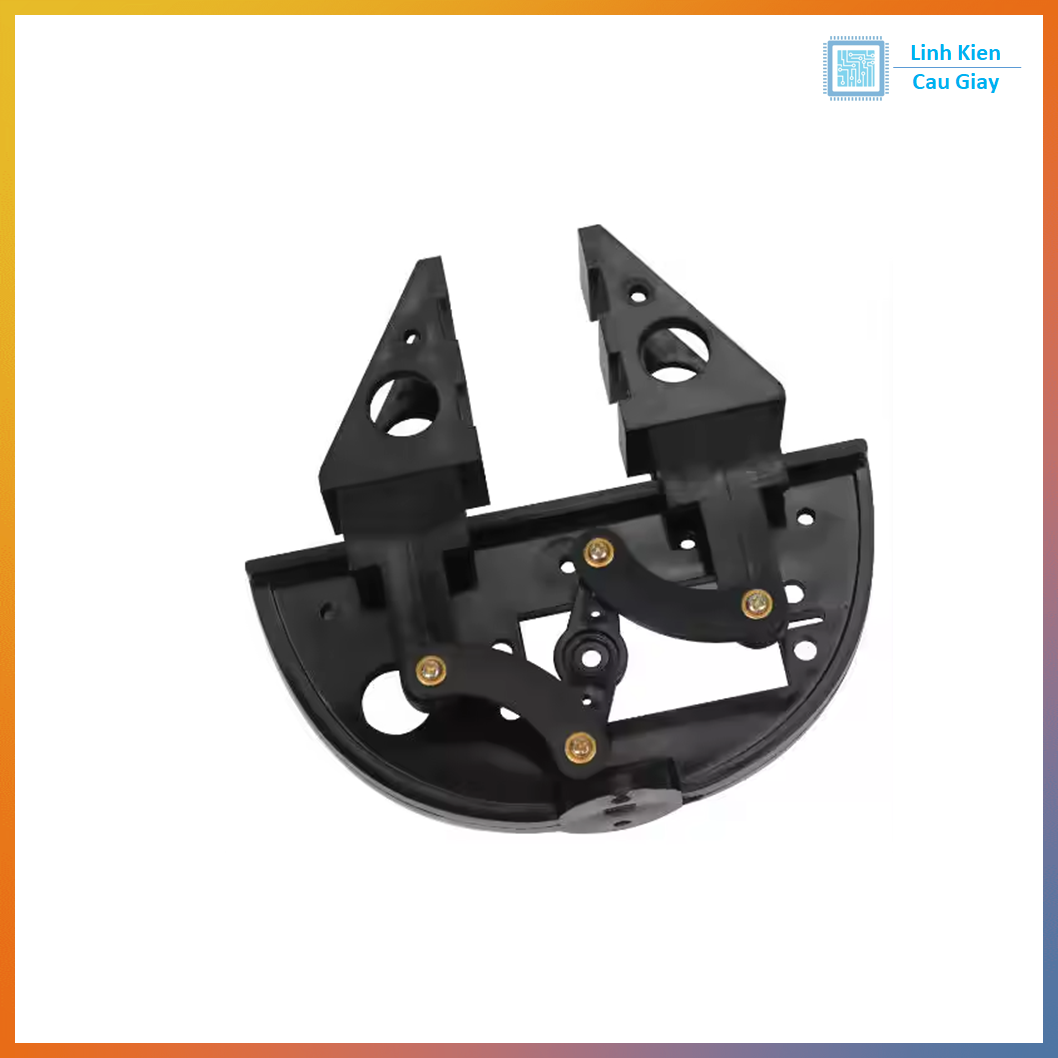
Tay gắp robot dùng cho động cơ servo MG995 được thiết kế dạng kìm kẹp hai càng, truyền động bằng servo đặt ở giữa thông qua cụm thanh liên kết.
Chất liệu nhựa ABS dày, kết hợp ốc – bạc kim loại tại các khớp nên vừa nhẹ, vừa chịu lực tốt, thích hợp cho các mô hình robot, cánh tay gắp đặt trên xe, trên băng tải.
Khoảng mở tối đa của tay kẹp khoảng 55mm, chiều cao má kẹp ~45mm, chiều ngang tổng thể khoảng 110mm, có thể gắp được nhiều loại vật: khối gỗ, chai nhựa nhỏ, hộp linh kiện, bóng xốp… Phần đáy tay kẹp có lỗ bắt ốc tiêu chuẩn để lắp vào servo MG995 hoặc các servo cỡ tương đương.
Ứng dụng
-
Làm tay gắp cho cánh tay robot 4–6 bậc tự do, robot gắp đặt, robot pick & place.
-
Gắn lên xe robot, robot dò line, robot Mecanum để gắp bóng, gắp vật mẫu trong cuộc thi.
-
Dùng trong dự án STEM, mô hình tự động hóa, đồ án sinh viên cơ điện tử.
-
Làm bộ mô phỏng tay kẹp trong dây chuyền sản xuất, kho bãi mini, sort hàng.
Sơ đồ chân
-
Chỗ gắn servo:
-
Đế tay gắp có lỗ tròn trung tâm + lỗ bắt vít tương thích với servo MG995 (và các servo vỏ tiêu chuẩn 40×20mm).
-
Cần servo được bắt vào thanh truyền ở giữa, truyền động mở/đóng hai càng kẹp.
-
-
Lỗ bắt khung/cánh tay robot:
-
Mặt sau/đáy có các lỗ ốc M3/M4 để bắt lên plate nhôm, mica, khung robot hoặc khớp xoay.
-
-
Dây servo:
-
Dây 3 lõi (nâu/đỏ/cam hoặc tương đương):
-
GND (–)
-
VCC (+4.8–6V)
-
Signal (tín hiệu PWM từ Arduino/vi điều khiển).
-
-
Thông số kĩ thuật
-
Loại: Tay gắp robot 2 càng cho servo MG995
-
Chất liệu chính: Nhựa ABS + ốc/bạc kim loại
-
Kích thước:
-
Chiều ngang tổng thể: ~110mm
-
Khoảng mở miệng kẹp: ~55mm
-
Chiều cao má kẹp: ~45mm
-
-
Servo tương thích: MG995, MG996R, SG5010 và các servo size tương đương
-
Màu sắc: Đen
-
Trọng lượng: nhẹ, phù hợp gắn trên cánh tay robot nhiều bậc tự do
Hướng dẫn sử dụng
-
Gắn servo MG995 vào vị trí thiết kế trên tay gắp, cố định bằng ốc kèm theo.
-
Bắt cần servo (horn) vào thanh truyền động của tay kẹp bằng vít, đảm bảo tay gắp đóng/mở đều hai bên.
-
Cố định toàn bộ tay gắp lên cánh tay robot hoặc khung xe bằng các lỗ ốc phía dưới/ phía sau.
-
Cấp nguồn 4.8–6V cho servo (nên dùng nguồn riêng hoặc BEC cho servo), tín hiệu điều khiển lấy từ Arduino, ESP32, STM32, mạch điều khiển robot…
-
Lập trình servo quay khoảng 0–90° hoặc 0–120° để tạo hành trình mở/đóng kẹp; thử nhiều lần để tránh chạm cơ khí.
-
Không kẹp vật quá nặng so với mô-men servo, tránh để servo kẹp chặt đứng im lâu gây nóng và giảm tuổi thọ.
Hình ảnh

Bảo hành
Linh kiện mới 100%, test kỹ nếu khách yêu cầu
Không bảo hành với linh kiện điện tử nhỏ (IC, chip, transistor…)
Quý khách cần có kiến thức cơ bản về điện tử để lắp đặt đúng cách
Hỗ trợ kỹ thuật miễn phí nếu liên hệ trước khi đặt hàng
Tại sao chọn mua tại Linh Kiện Cầu Giấy?
✅ Giao hàng toàn quốc – nhanh chóng, đóng gói cẩn thận
✅ Hỗ trợ kỹ thuật nhiệt tình, tư vấn đúng nhu cầu
✅ Cam kết linh kiện chính hãng, đúng mô tả
✅Giá cạnh tranh, phù hợp sinh viên, kỹ sư và DIY Maker
Hashtag
#tay_gắp_robot_MG995,
#robot_gripper_claw,
#kìm_gắp_robot_nhựa_ABS,
#tay_kẹp_cho_cánh_tay_robot,
#phụ_kiện_robot_STEM,
#tay_gắp_cho_arduino,
#bộ_kẹp_robot_gắp_đặt,
#linh_kiện_cơ_khí_robot,
#dự_án_cơ_điện_tử,
#linh_kiện_LKCG
.