

-
-
-
Phí vận chuyển: Tính khi thanh toánTổng tiền thanh toán:
-






Module Cảm Biến MPU6500 6DOF Gia Tốc + Con Quay Hồi Chuyển
(Mã SP:PVN5792)
Thương hiệu: Chưa cập nhật
25.000₫
47.500₫
Module Cảm Biến MPU6500 6DOF Gia Tốc + Con Quay Hồi Chuyển
Mô tả sản phẩm
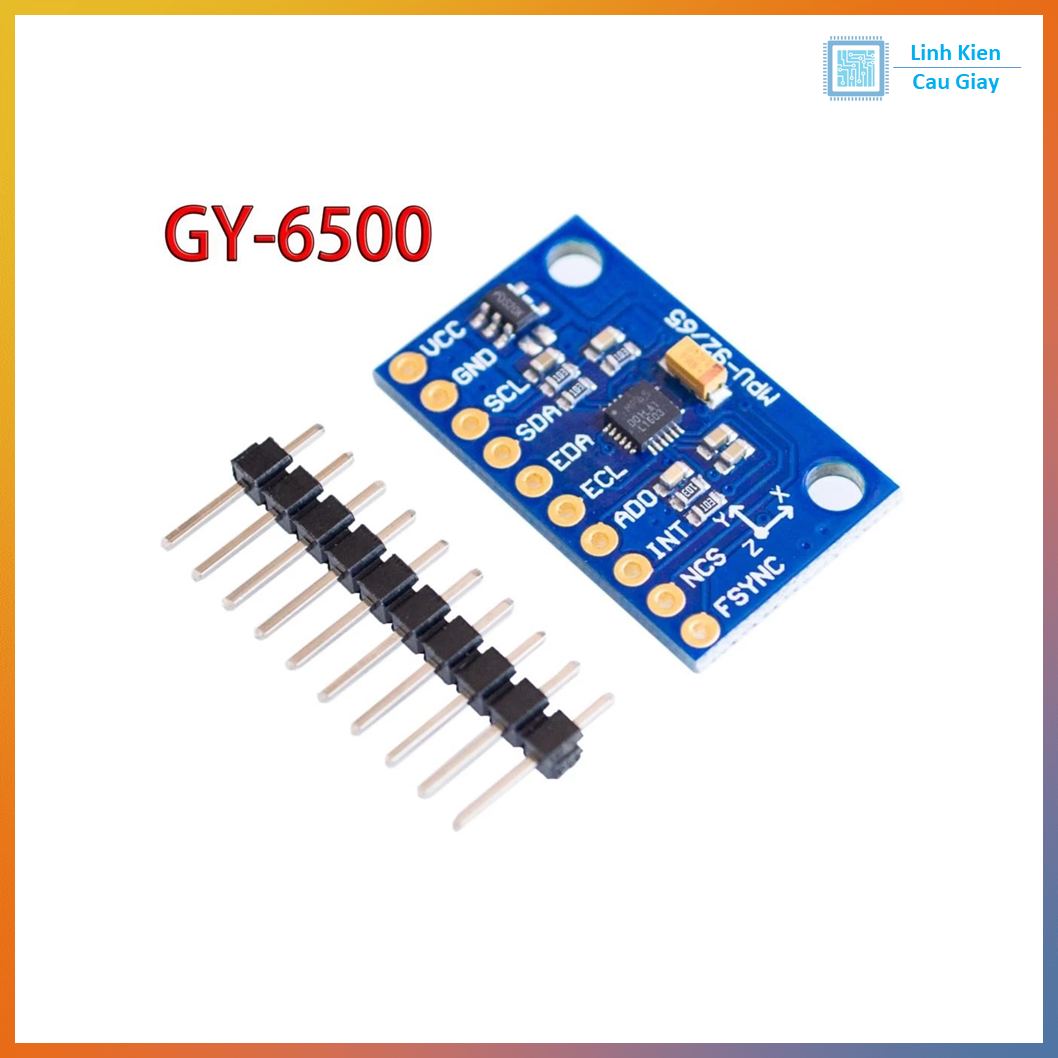
Module cảm biến MPU6500 6DOF (GY-6500) là cảm biến quán tính tích hợp gia tốc kế 3 trục + con quay hồi chuyển 3 trục trên cùng một chip, giúp đo gia tốc, góc nghiêng, tốc độ quay, chuyển động của vật thể trong không gian. Module hỗ trợ giao tiếp I2C hoặc SPI, dễ dàng kết nối với Arduino, ESP32, STM32, Raspberry Pi và các vi điều khiển khác.
Sản phẩm phù hợp cho các dự án robot tự cân bằng, drone, xe tự hành, chống rung, đo chuyển động, thiết bị đeo, học tập IMU. Module có mạch ổn áp tích hợp, hỗ trợ cấp nguồn 3–5V, tiện lợi cho nhiều hệ thống.
Linh kiện Cầu Giấy cung cấp module MPU6500 6DOF chất lượng tốt, phù hợp cho nhu cầu DIY, nghiên cứu, học tập và phát triển sản phẩm nhúng.
Ưu điểm nổi bật
-
Tích hợp 6DOF: 3 trục gia tốc + 3 trục gyro
-
Giao tiếp I2C / SPI linh hoạt
-
ADC 16-bit cho dữ liệu số độ phân giải cao
-
Hỗ trợ nhiều thang đo gia tốc và gyro
-
Kích thước nhỏ gọn, dễ tích hợp vào robot/thiết bị nhỏ
Ứng dụng
-
Robot tự cân bằng, robot dò đường, robot 2 bánh
-
Drone / quadcopter (đo góc, ổn định tư thế)
-
Xe tự hành và hệ thống định hướng chuyển động
-
Thiết bị đeo, phát hiện té ngã, nhận diện cử chỉ
-
Chống rung / đo rung động trong mô hình cơ điện tử
-
Học tập về IMU, sensor fusion, Kalman/Complementary filter
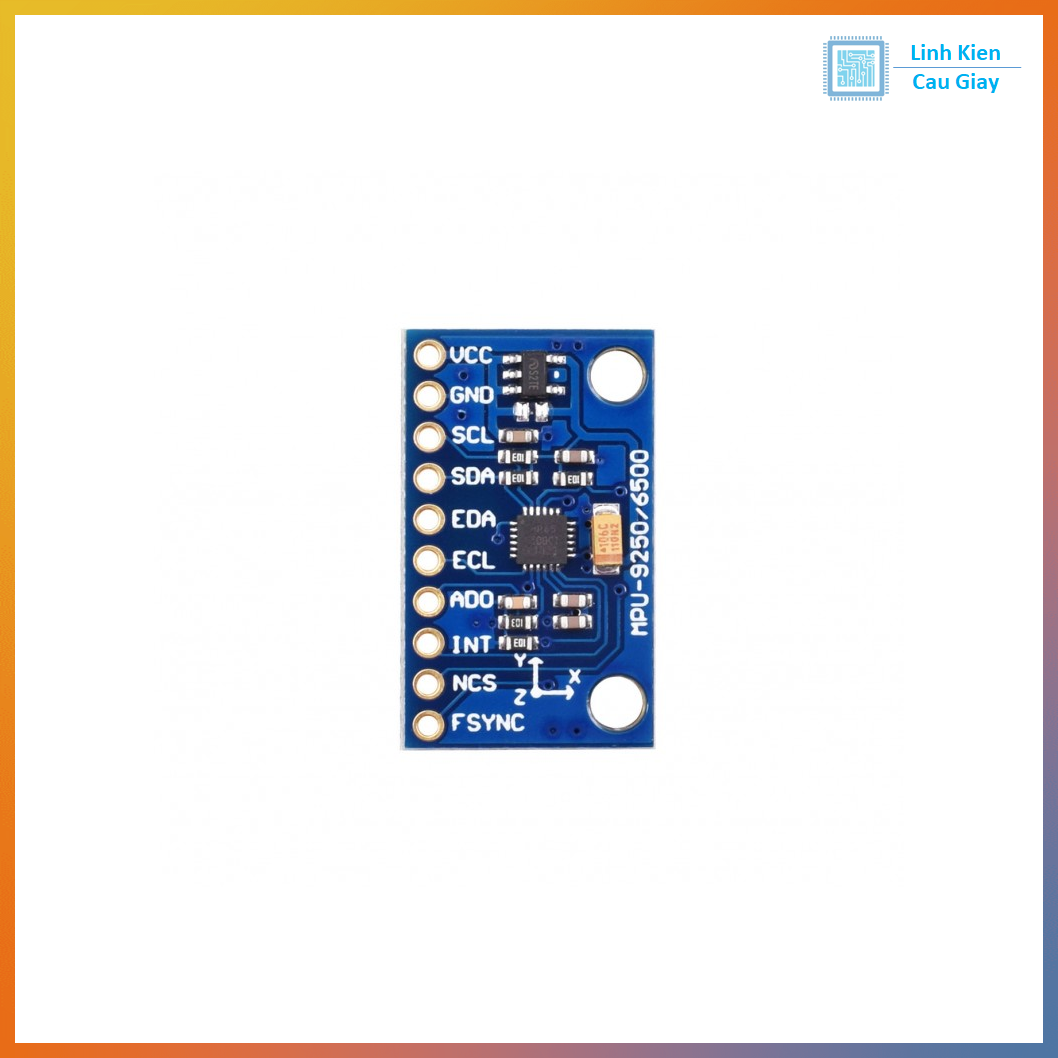
Sơ đồ chân
Mặt trước (ký hiệu trên board)
-
VCC: Nguồn vào (3–5V)
-
GND: Mass
-
SCL: Clock I2C / SCLK (SPI clock tùy chế độ)
-
SDA: Data I2C / SDI (SPI data)
-
EDA: Auxiliary I2C Data
-
ECL: Auxiliary I2C Clock
-
AD0: Chọn địa chỉ I2C
-
INT: Ngắt (Interrupt)
-
NCS: Chip Select (SPI)
-
FSYNC: Đồng bộ khung (Frame Sync)
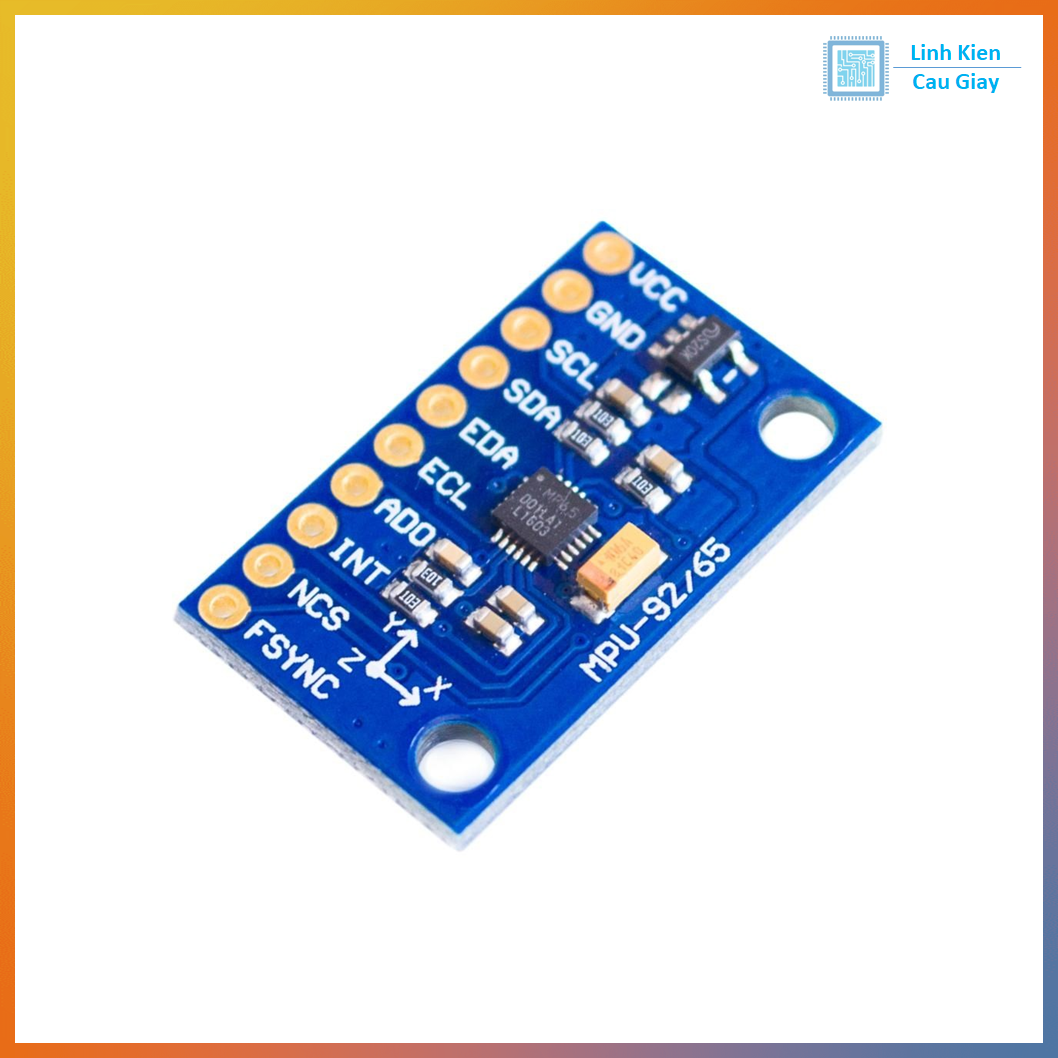
Mặt sau (ghi chú tương đương)
-
VCC, GND
-
SCL/SCLK
-
SDA/SDI
-
EDA
-
ECL
-
AD0/SDO
-
INT
-
NCS
-
FSYNC
Kết nối nhanh (I2C) với Arduino UNO (tham khảo)
-
VCC → 5V (module có ổn áp)
-
GND → GND
-
SCL → A5
-
SDA → A4
-
INT → chân digital (tùy chọn)
-
AD0 → GND hoặc VCC (đổi địa chỉ I2C)
Kết nối nhanh (I2C) với ESP32 (tham khảo)
-
VCC → 3V3 hoặc 5V (tùy board/module)
-
GND → GND
-
SCL → GPIO22
-
SDA → GPIO21
-
Lưu ý địa chỉ I2C: thường là 0x68 hoặc 0x69 tùy mức chân AD0.
Thông số kĩ thuật
-
Model module: GY-6500
-
Chip sử dụng: MPU-6500
-
Loại cảm biến: IMU 6DOF (3-axis Gyroscope + 3-axis Accelerometer)
-
Nguồn cấp: 3–5V (có ổn áp LDO tích hợp)
-
Giao tiếp: Chuẩn I2C / SPI
-
ADC nội: 16-bit, xuất dữ liệu số 16-bit
-
Thang đo con quay hồi chuyển (Gyro):
±250 / ±500 / ±1000 / ±2000 °/s -
Thang đo gia tốc (Accel):
±2g / ±4g / ±8g / ±16g -
Khoảng cách chân header: 2.54mm
-
Kích thước module: khoảng 15mm × 25mm
-
PCB: mạ vàng (theo mô tả ảnh), hàn máy
Hướng dẫn sử dụng
A. Kết nối phần cứng (I2C – dễ dùng nhất)
-
Nối VCC, GND, SCL, SDA với vi điều khiển.
-
(Tùy chọn) nối INT nếu cần ngắt dữ liệu.
-
Chọn địa chỉ I2C bằng chân AD0:
-
AD0 = GND → địa chỉ thường 0x68
-
AD0 = VCC → địa chỉ thường 0x69
-
B. Lập trình cơ bản
-
Dùng thư viện hỗ trợ MPU6500 / MPU6050-compatible (tùy thư viện)
-
Đọc các giá trị:
-
Accel X/Y/Z
-
Gyro X/Y/Z
-
(nếu thư viện hỗ trợ) nhiệt độ nội chip
-
C. Hiệu chuẩn (khuyến nghị)
-
Đặt module nằm yên trên mặt phẳng khi khởi động
-
Lấy nhiều mẫu trung bình để xác định offset
-
Áp dụng lọc:
-
Moving average
-
Complementary filter
-
Kalman filter (nếu cần độ mượt cao)
-
D. Lưu ý sử dụng
-
Tránh rung mạnh khi đọc dữ liệu thô
-
Dây I2C nên ngắn, nối mass tốt để giảm nhiễu
-
Nếu đọc không thấy cảm biến, hãy:
-
quét địa chỉ I2C
-
kiểm tra AD0
-
kiểm tra nguồn 3V3/5V và chân SDA/SCL
-
Hình ảnh
Bảo hành
Linh kiện mới 100%, test kỹ nếu khách yêu cầu
Không bảo hành với linh kiện điện tử nhỏ (IC, chip, transistor…)
Quý khách cần có kiến thức cơ bản về điện tử để lắp đặt đúng cách
Hỗ trợ kỹ thuật miễn phí nếu liên hệ trước khi đặt hàng
Tại sao chọn mua tại Linh Kiện Cầu Giấy?
✅ Giao hàng toàn quốc – nhanh chóng, đóng gói cẩn thận
✅ Hỗ trợ kỹ thuật nhiệt tình, tư vấn đúng nhu cầu
✅ Cam kết linh kiện chính hãng, đúng mô tả
✅Giá cạnh tranh, phù hợp sinh viên, kỹ sư và DIY Maker
Hashtag
#MPU6500 #GY6500 #IMU #6DOF #gyroscope #accelerometer #cambiengoc #cambiengiaToc #I2C #SPI #arduino #esp32 #stm32 #robot #LinhKienCauGiay #LKCG















































